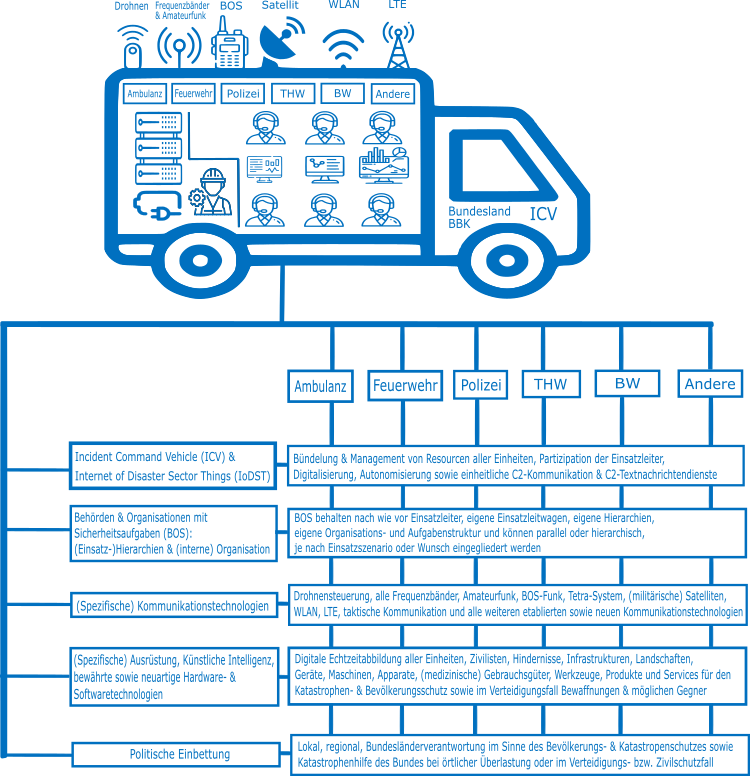
Incident Command Vehicle (ICV)
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Effektive Führung im Katastrophenfall – Einsatzbeispiel
Ereignis: Unvorhersehbarer Katastrophenfall
z.B. Hochwasser, Flut, Flächenbrand, Brandherd inmitten Infrastruktur, Bahnunfall, etc.
Herausforderungen:
Infrastrukturelles Chaos, unwegsames oder schwer zugängliches Gelände, keine sofortige Stromzufuhr, keine etablierte Kommunikationsstruktur, kein schweres Einsatzgerät vor Ort, Stress, Angst und Panik der Akteure, keine existierende Rettungskette innerhalb eines notwendigen Zeitraumes zu Beginn, etc.
Verbringung des ICV an den Katastrophenort
sowie Übernahme Inbetriebnahme durch eine interdisziplinäre Einsatzleitung

Ziel: Effektive Führung im Katastrophenfall durch
1. schnelle Etablierung einer einheitlich digitalisierten und mobilen Einsatzleitzentrale
2. die alle verfügbaren Einsatzkräften verbindet, Einsatzleiter vernetzt ohne sich in die jeweiligen Organisationen einzumischen
3. auf Grundlage eines einheitlichen Lagebildes, das die infrastrukturellen, geologischen und humanitären Gegebenheiten mittels Drohnen und KI Datenverarbeitung erfasst
Gesamte (kollabierte) Informations- und Kommunikationsinfrastruktur
kann in einem 50 km Umkreis durch das ICV wiederhergestellt werden. Jeder kann einen Notruf an das ICV absetzten.
Übergaben und Übergabeprotokolle
werden digital erfasst und an entsprechende Nachfolgepersonen ausgegeben
Außenausstattung




Fahrgestell: Iveco X-Way AD280X42Y
- Länge: 10,218 m
- Breite: 2,55 m (ausgefahren 4,985m)
- Höhe: 3,985 m
- Zulässiges Gesamtgewicht: 26t
- Motorleistung: 309 kW (420 PS)
- Antrieb: 6X2 mit mitlenkender Hinterachse
- Besatzung: 1:2
- Elektromechanisches Stützen- und Slide-Out-System (1:2-Auszug)
Klimatisierung und Versorgung
- 15,9kW Dachklimaanlage für Arbeitsraum
- 2kW Dachklimaanlage für Supervisor-Raum
- 2kW Dachklimaanlage für Serverraum
- Dieselgenerator Fischer Panda 18,0kVA
- 20x 120W Solar Paneel
- 6x200AH Lithium-Ionen-Batterie
Elektronische Zusatzausstattung außen
- Warnanlage: 12 Blitzer + Rundumkennleuchten in blau und orange
- Schwenk- und neigbarer Lichtmast
- Mastkamera: 32-fach 4K-Zoom-Kamera mit integrierter Wärmebildkamera
- Antennenmast
- Bird-View-System
Ausstattung Mission-Control Raum


- 6 modulare Operator-Arbeitsplätze
- Multifunktionsdrucker
- neuartige gesundheitsfreundliche Klimatisierungstechnologie mit nahezu geräuschlosen, räumlich abgetrennten Lüftungssystemen, die mittels Klimatisierungsschläuchen gleichmäßig verteilend entlang der Sitze im Mission Control Raum kühlen, um Verkühlung und Nackenstarre zu verhindern


- 75″ und 86“-Touch-Monitor zur Lagedarstellung
- Arbeitsplätze mit je 1x 43“ Monitor, diversen Kommunikationsanschlüssen und Stream-Deck
Ausstattung Supervisor- und Serverraum


- Supervisor-Raum ausgelegt für 1 Person
- Arbeitsplatz mit 43“ Monitor
- 10“ CZone Touch mit Mastervolt-Steuersystem (Lichtsteuerung, Energiemanagement…)
- Intercom über DECT-Telefonie
- Rechenzentruman Bord einschließlich künstlicher Intelligenz, um
kartografisch Ressourcen wie Krankenhäuser, Apotheken, Baumärkte, Straßen Wege etc zu identifizieren


- Modular skalierbare Videomatrix: NDI IP-basierend
- Multiviewsystem mit max. 16 Eingängen
- Diverse Funk- und Mobilfunk – Kommunikationsmöglichkeiten
- SAT-Anlage mit HD-Tuner
- 4 Energiesysteme an Bord, darunter Li Ionen Batteriepacks und der weltweit größte Dieselgenerator für einen 26 Tonner,
welche mindestens 48 Stunden lang den ICV autark versorgen. Dazu kommen Solarmodule und externe Einspeisung.
Forschungs-Projekts AKIT PRO
Dieses Fahrzeug ist als mobile Einsatzzentrale Teil des Forschungs-Projekts AKIT PRO.
AKIT ist die Abkürzung für „Autonomie-KIT für seriennahe Arbeitsfahrzeuge zur vernetzten und assistierten Bergung von Gefahrenquellen“
Im Projekt AKIT (beendet 2019) wurde ein Zurüstkit für seriennahe Arbeitsfahrzeuge entwickelt, welches es ermöglicht diese in teleoperierbare und autonom bzw. teilautonom agierende Berge- und Transportfahrzeuge umzurüsten um Rettungskräfte in Großschadenslage weltweit schnell unterstützen zu können.
Fassbergung und Aushub kontaminierter Erde mittels ferngesteuertem Minibagger
Im Projekt AKIT PRO sollen diese zur Überführung in ein operationelles System weiterentwickelt werden. Des Weiteren sieht das Projekt eine intensive Erprobung der Ergebnisse mit Anwendern in etablierten Rettungs- und Bergungsverfahren. Die Universalität des Ansatzes wird durch eine Erweiterung der beteiligten Fahrzeugflotte demonstriert.
Dieses Autonomie-KIT sollte durch Funktionen wie autonome Navigation in unstrukturierter Umgebung, die 3D-basierte assistierte Objektmanipulation, die Lageermittlung via Copter/Drohne, die Einsatzleitung und die situationsangepasste Vernetzung optimal unterstützen und damit den Bergungskräften eine zügige Beräumung von Gefahrenquellen ermöglichen. Durch die Umsetzung als Zurüst-Kit würden keine speziell umgerüsteten Fahrzeuge weltweit vorgehalten werden müssen, sondern können am Einsatzort beschafft und qualifiziert werden.
BINZ, ein „Leuchtturm der zivilen Sicherheit“
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Fotostrecke









Sehen Sie hier ein ähnliches Fahrzeug in Aktion:
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren