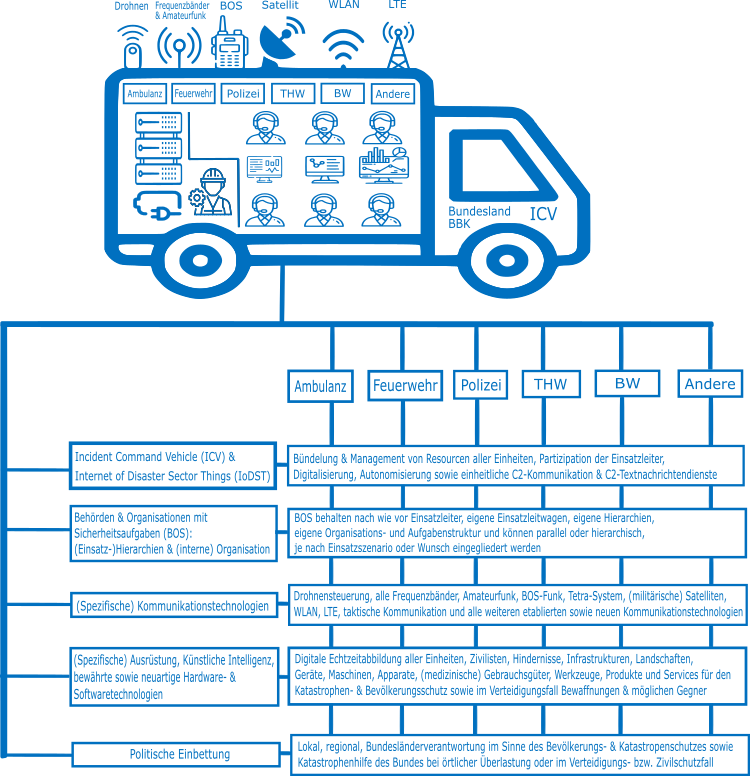
Incident Command Vehicle (ICV)
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren
Effective leadership in the event of a disaster – deployment example
Event: Unpredictable disaster event
e.g. high tide, flood, wildfire, fire in the middle of infrastructure, railroad accident, etc.
Challenges:
Infrastructural chaos, impassable or difficult to access terrain, no immediate power supply, no established communication structure, no heavy emergency equipment on the spot, stress, fear and panic of the protagonists, no existing rescue chain within a necessary period of time at the beginning, etc
Moving the ICV to the disaster site
as well as takeover of commissioning by an interdisciplinary operations team

Goal: Effective leadership in the event of a disaster through
1. Rapid establishment of a uniformly digitized and mobile operations control center.
2. which connects all available emergency forces, networks emergency managers without interfering with the respective organizations
3. based on a unified situational picture that captures infrastructural, geological, and humanitarian conditions using drones and AI data processing.
Entire (collapsed) information and communication infrastructure
can be restored within a 50 km radius by the ICV. Anyone can place an emergency call to the ICV.
Handovers and handover protocols
are digitally recorded and issued to appropriate successors
Exterior equipment




Chassis: Iveco X-Way AD280X42Y
- Length: 10.218 m
- Width: 2.55m (extended 4.985m)
- Height: 3.985 m
- Permissible total weight: 26t
- Engine power: 309 kW (420 hp)
- Drive: 6X2 with self-steering rear axle
- Crew: 1:2
- Electromechanical support and slide-out system (1:2 pull-out)
Air conditioning and supply
- 15,9kW roof air conditioner for working room
- 2kW roof air conditioner for supervisor room
- 2kW roof air conditioner for server room
- Diesel generator Fischer Panda 18,0kVA
- 20x 120W solar panel
- 6x200AH lithium ion battery
Additional electronic equipment outside
- Warning system: 12 flashers + rotating beacons in blue and orange
- Pivoting and tilting light pole
- Mast camera: 32x 4K zoom camera with integrated thermal imaging camera
- Antenna mast
- Bird View System
Equipment Mission Control Room


- 6 modular operator workstations
- Multifunction printer
- novel health-friendly air-conditioning technology with virtually noiseless, spatially separated ventilation systems that use air-conditioning hoses to cool evenly distributed along the seats in the Mission Control room to prevent chills and stiffness in the neck


- 75″ and 86″ touch monitor for situation display
- Workstations with 1x 43″ monitor each, various communication ports and stream deck
Equipment supervisor and server room


- Supervisor room designed for 1 person
- Workstation with 43″ monitor
- 10″ CZone Touch with Mastervolt control system (light control, energy management…)
- Intercom via DECT telephony
- data centeronboard, including artificial intelligence, in order to
map resources such as hospitals, pharmacies, hardware stores, roadways, etc.


- Modular scalable video matrix: NDI IP-based
- Multiview system with max. 16 inputs
- Various radio and mobile communication options
- SAT system with HD tuner
- 4 energy systems on board, including Li Ion battery packs and the world’s largest diesel generator for a 26 ton truck,
which supply the ICV self-sufficiently for at least 48 hours. In addition, there are solar modules and external feed.
Research project AKIT PRO
This vehicle is part of the AKIT PRO research project as a mobile operations center.
AKIT is the abbreviation for “Autonomy KIT for near-series work vehicles for networked and assisted recovery from sources of danger”.
In the AKIT project (to be completed in 2019), a retrofit kit was developed for near-series work vehicles that enables them to be converted into teleoperable and autonomous or semi-autonomous recovery and transport vehicles in order to provide rapid support to rescue forces in large-scale emergencies worldwide.
Barrel salvage and excavation of contaminated soil by means of remote-controlled mini-excavator
In the AKIT PRO project, these are to be further developed for transfer to an operational system. Furthermore, the project foresees an intensive testing of the results with users in established rescue and recovery procedures. The universality of the approach is demonstrated by expanding the fleet of vehicles involved.
This autonomy KIT should provide optimal support through functions such as autonomous navigation in unstructured environments, 3D-based assisted object manipulation, situational awareness via copter/drone, mission control and situation-adapted networking, thus enabling recovery forces to rapidly clear sources of danger. By implementing this as a retrofit kit, no specially converted vehicles would have to be kept in stock worldwide; instead, they can be procured and qualified at the point of use.
Photo gallery









See a similar vehicle in action here:
Mit dem Laden des Videos akzeptieren Sie die Datenschutzerklärung von YouTube.
Mehr erfahren